Reliable UAV navigationwhen GPS cannot be trusted.
KALGARD Systems develops onboard navigation technology for drones operating in GNSS-denied, jammed, spoofed, or unreliable environments.
Focus
GNSS-denied
Navigation for degraded or unavailable satellite signals.
Approach
Onboard
Onboard estimation with correction from observed environmental features.
Stage
Prototype
Active development, flight testing, and technical validation.
Current program
MerlinSight
System note
MerlinSight is being developed as an onboard module for resilient localization in degraded environments.
Flight validation
Test flights have demonstrated localization error below 5 m, including in a defense evaluation context.
Why this matters
Reliable positioning is a hard requirement for UAV operations, yet GNSS is not always available or trustworthy.
KALGARD is building navigation systems that help drones maintain localization and mission continuity when satellite signals degrade, are spoofed, or disappear.

Development context
Hardware and flight integration work focused on practical UAV deployment constraints.
MerlinSight
MerlinSight is an onboard navigation system for UAVs designed for GPS-denied operation.
It combines onboard navigation with map-based correction from observed environmental features to support robust localization in degraded environments.

Prototype module
Onboard architecture
Designed to sit on the aircraft and preserve navigation when GNSS quality breaks down.
System overview
MerlinSight provides a resilient onboard localization layer for UAVs that need to keep operating when satellite positioning becomes unavailable or untrustworthy.
Visual-inertial navigation
Onboard estimation from camera and inertial sensing to maintain a continuous position solution.
Map-based correction
Uses observed environmental features and trusted reference data to correct drift during flight.
UAV integration
Built to support onboard navigation decisions on operational UAVs, not just post-flight analysis.
Correction approach
Map-based localization
MerlinSight performs map-based correction by comparing observed environmental features with trusted reference data, reducing drift when GNSS cannot be relied on.

Evaluation
Flight-tested precision
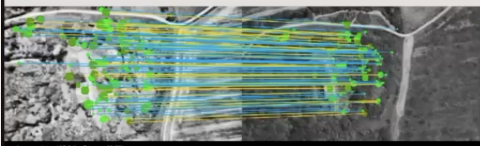
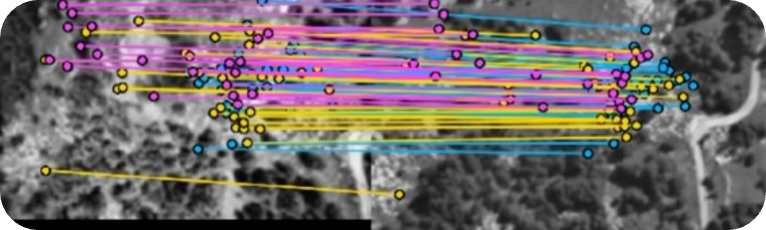
Across flight testing, MerlinSight has demonstrated sub-5 m mean localization error. The figures below show one defense evaluation flight as an example, using post-convergence comparison against GPS ground truth.
Example defense evaluation flight
3.43 m
Mean 2D error
4.24 m
Mean 3D error
1.76 m
2D standard deviation
5.74 m
2D p90
1.55 m
Altitude MAE
5m 17s
Flight duration
The flight duration was set by the authorized flight zone. MerlinSight is designed to correct drift against reference observations during flight, rather than let dead-reckoning error accumulate with elapsed time; longer and more varied flights are part of ongoing validation.
Where it fits
MerlinSight is relevant to UAV operations that need resilient localization when GNSS performance becomes unreliable.
Defense and security UAVs
Critical infrastructure monitoring
Operations in GNSS-degraded environments
System walkthrough
Navigation that recovers when GNSS disappears
From visual-inertial estimation to terrain-matched correction, this sequence shows how MerlinSight contains drift and brings the aircraft back onto a trusted trajectory.
Research to product
KALGARD Systems is an INRIA-incubated company focused on resilient UAV navigation.
Focused technical development
The company is building MerlinSight at the intersection of onboard perception, navigation, and UAV integration.

Incubation
The company is being developed with INRIA incubation support.
We are looking for partners to help MerlinSight bring autonomy and resilience to drones.
KALGARD is opening conversations with organizations interested in resilient UAV navigation, field validation, and operational deployment.
KALGARD
Systems
UAV integrators
Explore MerlinSight integration on existing drone platforms.
Defense and civil end users
Discuss operational needs and validation scenarios in GNSS-degraded environments.
Investors
Support the next stage of product development, testing, and market access.
Aeronautics and robotics, built into one team
KALGARD brings together aerospace engineering and advanced robotics expertise to develop resilient navigation systems from research through flight integration.
Jules
Aeronautical Engineer
Imperial College London
Aeronautical engineering expertise focused on UAV systems, product development, and bringing MerlinSight into operational flight environments.
Thibault
PhD in Robotics · Engineer
ISAE-SUPAERO
Robotics and engineering expertise focused on autonomous navigation, onboard perception, and resilient localization.
Start the conversation
We welcome conversations with UAV manufacturers, defense and aerospace partners, public innovation stakeholders, investors, and engineers interested in the problem space.
Call to action
Partnerships, pilots, and technical discussions.
Get in touch if you are exploring resilient navigation, integration into a UAV platform, investment, or opportunities to work together.